Hi, I'm Chemin Ahn.
Interests:
I'm Robotics Engineer
Major: Robotics
Lab: Robotics Innovatory
MS: Sungkyunkwan University - Mechanical Engineering (Ongoing)
BS: Chungang University - Mechanical Engineering
About
I am a Master’s student in Mechanical Engineering at Sungkyunkwan University, specializing in Robotics. My research interests lie in Imitation Learning, Teleoperation, and Robotics Control, with a current focus on manipulator robot learning and control using imitation-based methods. Previously, I interned at Doosan Robotics in the Robot Control Team, gaining hands-on experience in industrial robot systems. I primarily work with Python, ROS/ROS2, and MATLAB for robotics development.
-
Master’s Degree Projects:
- 1. Teleoperation with a VR tracker
- 2. Leader–follower teleoperation with force feedback & gravity compensation.
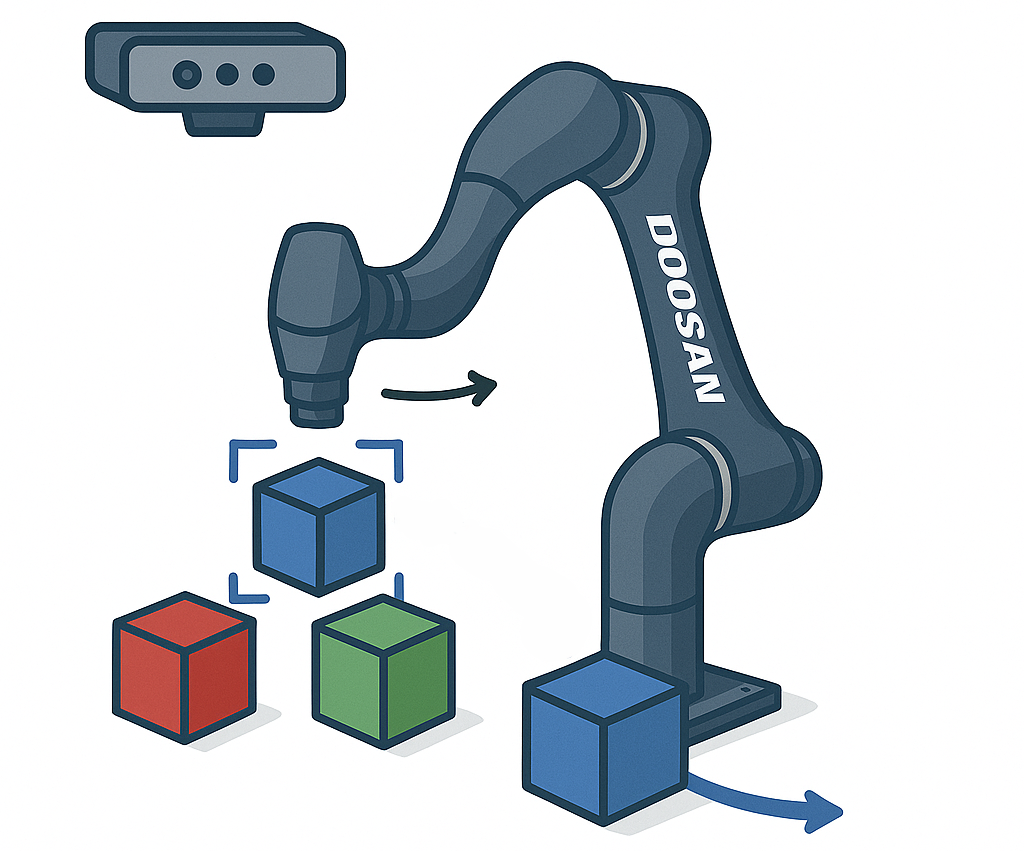
- 3. ACT-based training and roll-out on a one-arm manipulator.
- 4. ACT-based training and roll-out on a dual-arm manipulator w/ hands.
- 5. Multimodal imitation learning (vision + force). — ongoing
- 6. Dexterous manipulation with dual-arm and hands via imitation learning. — ongoing
-
My past projects include:
- 1. Development of a visual servoing package.
- 2. Design an autonomous mobile robot and Compare the algorithms.
- 3. Pharmaceutical preparation and delivery system using a manipulator and AMR.
- 4. Design of a passive wearable upper-limb assistive suit.
- 5. Autonomous drone navigation.
- Skills: Python, MATLAB, ROS, ROS2
- Libraries: NumPy, Pandas, OpenCV, Pytorch, matplotlib
- Simulation Tools: IsaacSim & IsaacLab, Gazebo
- Using Robot: Universal Robots, Doosan Robotics, Rainbow Robotics
- Tools & Technologies: Git, SOLIDWORKS
- Interests: Robotics, Imitation Learning, Reinforcement Learning, Teleoperation, Robotics Control, Computer Vision
- Military Service: ROK Army - Sergeant (May 2021 ~ Nov 2022)
Experience
- Developed visual servoing package based on ROS2.
- doosan-robot2_visualservoing Package
- Tools: Python, ROS2, Gazebo, SDF
Projects
Customized Imitation Learning based on ACT
- Tools: Python, Pytorch, ROS 2, ROS 1
- Customizing ACT and whole codes
- Collect demo data using teleoperation tools
- Dual arms and Hands IL video
- Dual arms IL video
- One arm IL video
Leader Arm: Teleoperation with force feedback and gravity compensation
- Tools: Python, C++, ROS 2, ROS 1, Solid Works, Dynamixel
- Dual arm Leader arm w/ Hands
- One arm Leader arm
Make teleoperation system using VR Tracker
- Tools: Python, ROS 2, ROS 1, VR Trackers
- Teleoperation with safety limits (Transformation Matrix based)
- Collect demo data using teleoperation tools
- VR Tracker Teleoperation video
- SLAM VR Tracker Teleoperation video
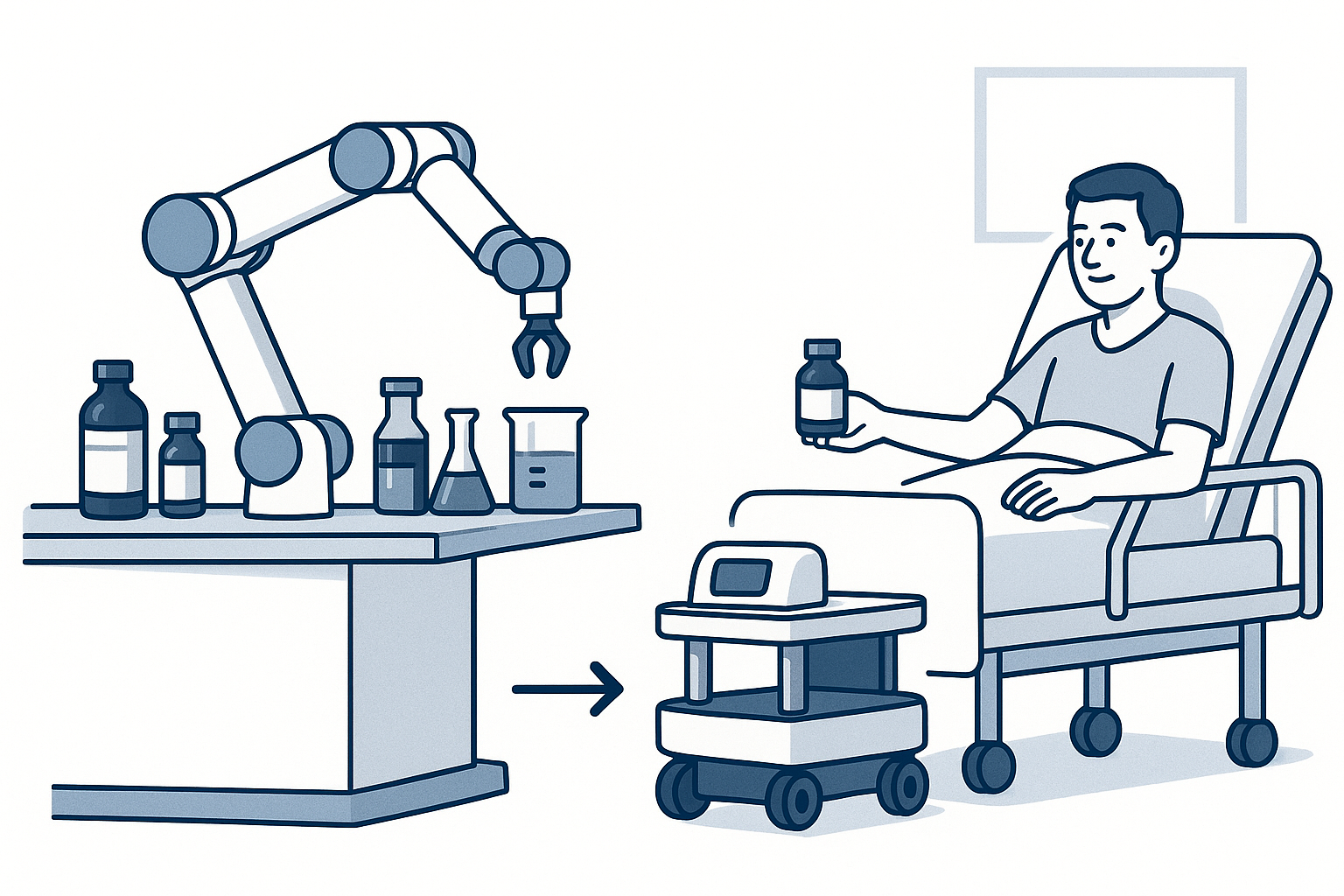
Designed a robot system to assist with drug prep and autonomous delivery.
- Tools: Python, C++, ROS1, Streamlit, Arduino, MATLAB
- Verified patient information and retrieved prescribed medication list.
- Used a manipulator to prepare the corresponding medications.
- Loaded prepared medications onto an autonomous mobile robot
- Delivered medications directly to the patient’s location.
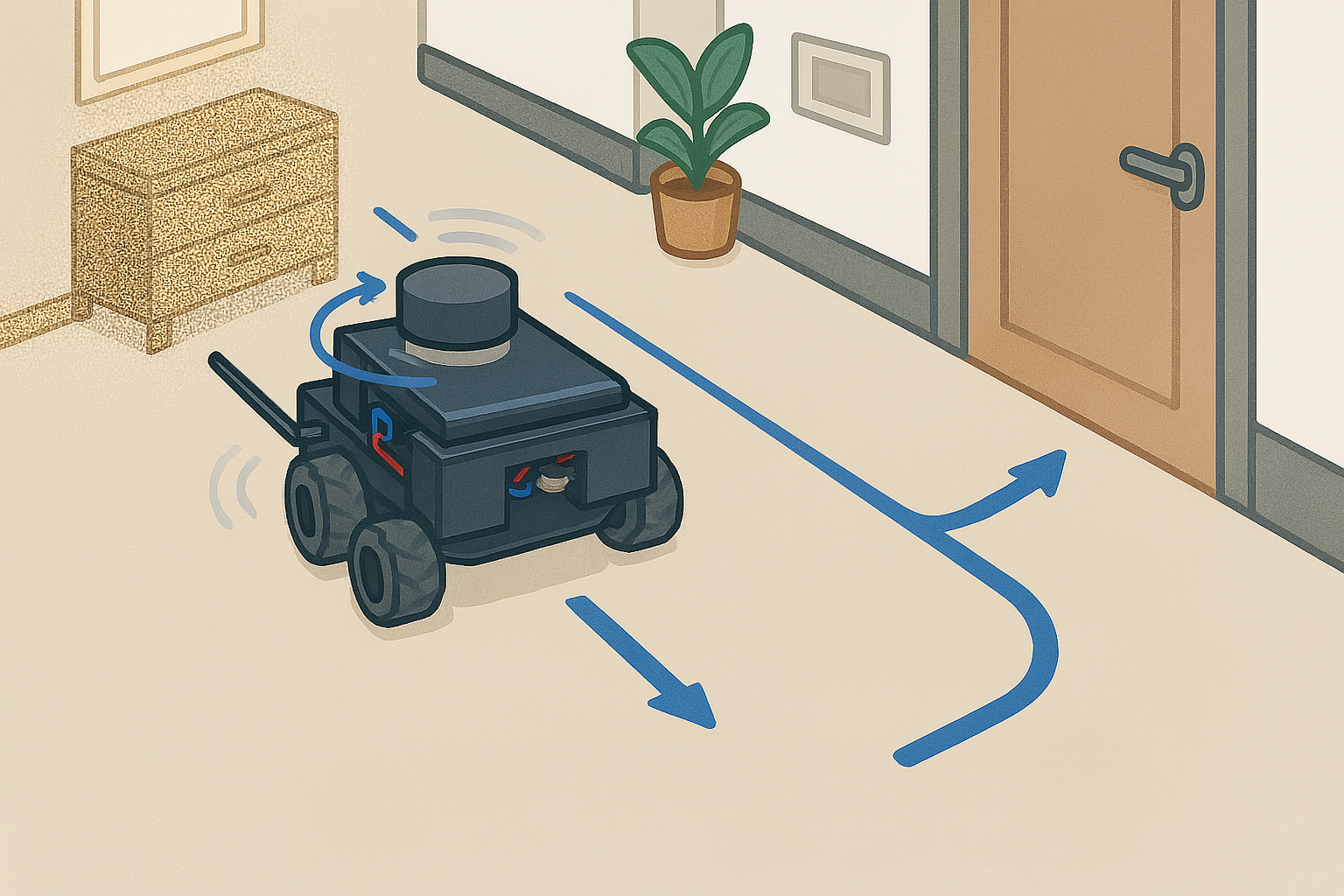
Designed an self-made autonomous mobile robot.
- Tools: Python ,C++, ROS1, LIDAR, Arduino, Rasberry Pi
- Built an self-made autonomous mobile robot using Raspberry Pi, Arduino Mega, encoder motors, and a 2D LIDAR.
- Implemented the ROS Navigation Stack
- Integrated two SLAM algorithms (GMapping, Hector) and two local planners (TEB, DWA).
- Compared four combinations in terms of navigation performance and stability.
Rewards
Seoul, Republic of Korea
Awarded by: KROS(Korea Robotics Society)
Date: 2026.02
Project:
- Force Feedback Leader Arm for High Quality Demo Data using F/T Sensor
Seoul, Republic of Korea
Awarded by: Chung-Ang University LINC 3.0
Date: 2024.06
Project:
- Analysis of optimal sensors and algorithm-specific navigation features for autonomous mobile robots
Seoul, Republic of Korea
Awarded by: KG ICT
Date: 2024.06
Project:
- Pharmaceutical preparation and autonomous delivery using Cobot and AMR
Skills
Skills
 MATLAB
MATLAB
 ROS
ROS
 ROS2
ROS2
Libraries
Simulation Tools
 IsaacSim & IsaacLab
IsaacSim & IsaacLab
 Gazebo
Gazebo
Manipulator
 Universal Robots
Universal Robots
 Rainbow Robotics
Rainbow Robotics
Other
 Git
Git
 Solid Works
Solid Works
Education
Suwon, Republic of Korea
Degree: MS - Mechanical Engineering
GPA: 4.13/4.5
- Intelligent Robotics
- Robot Reinforcement Learning
- Modern Control Systems
- Human–Robot Collaboration
Relevant Courseworks:
Seoul, Republic of Korea
Degree: BS - Mechanical Engineering
GPA: 3.84/4.5 (CUM LAUDE)
- Robotics Engineering
- Autonomous Control
- Mechatronics
- System Analysis
- Dynamics
- Visual Programming
Relevant Courseworks: